| หมวดสินค้า |
|---|
|
ทั้งหมด (1148) สินค้าไม่มีหมวดหมู่ (7) |
| เข้าสู่ระบบ |
|---|
| ตะกร้าสินค้าของคุณ |
|---|
| ไม่มีสินค้าในตะกร้า |
| สินค้าขายดี |
|---|
 หน้าปัดอลูมิเนียม volume มิเตอร์ สำหรับ r ปรับค่า
25 บาท
หน้าปัดอลูมิเนียม volume มิเตอร์ สำหรับ r ปรับค่า
25 บาท
 วัด v วัดtemp2ตัว แสดงเวลาได้ แสงสีแดง ติดมอไซด์ได้ นิวปาเจโรติดสวยมาก
450
330 บาท
วัด v วัดtemp2ตัว แสดงเวลาได้ แสงสีแดง ติดมอไซด์ได้ นิวปาเจโรติดสวยมาก
450
330 บาท
 -10% -10% F-Taobao.png "sensor แบบ ENCODE มีพัลออกมา 100pulse/REV ใช้วัดความเร็ว ระยะทาง") sensor แบบ ENCODE มีพัลออกมา 100pulse/REV ใช้วัดความเร็ว ระยะทาง
200 บาท
sensor แบบ ENCODE มีพัลออกมา 100pulse/REV ใช้วัดความเร็ว ระยะทาง
200 บาท
 วัดDC volt0-100 วัดกระแส100A ในตัวเดียวกัน ไว้ติดรถต่างๆ
480
330 บาท
วัดDC volt0-100 วัดกระแส100A ในตัวเดียวกัน ไว้ติดรถต่างๆ
480
330 บาท
 ที่ขัดเคลือบรถยนต์ไฟฟ้า12v
1,200
850 บาท
-40%
ที่ขัดเคลือบรถยนต์ไฟฟ้า12v
1,200
850 บาท
-40% สายสโคป BNC แบบปากคีบสะดวกมาก
180 บาท
สายสโคป BNC แบบปากคีบสะดวกมาก
180 บาท
 มิเตอร์วัด vและtemp 2บรรทัด เสียบที่จุดบุหรี่ ตัวสีดำ แสงสีแดงกับน้ำเงิน
300 บาท
มิเตอร์วัด vและtemp 2บรรทัด เสียบที่จุดบุหรี่ ตัวสีดำ แสงสีแดงกับน้ำเงิน
300 บาท
 มิเตอร์วัดvolt+แสดงระดับแบต+เทอร์โมมิเตอร์2จุดในรถและนอกรถ + นาฬิกา 4in1
800
220 บาท
-50%
มิเตอร์วัดvolt+แสดงระดับแบต+เทอร์โมมิเตอร์2จุดในรถและนอกรถ + นาฬิกา 4in1
800
220 บาท
-50% timer 220V ตั้งเวลา on/off 16Aไฟออก 220v weekly
370
290 บาท
timer 220V ตั้งเวลา on/off 16Aไฟออก 220v weekly
370
290 บาท
 ขายถูก มอเตอร์ 350w มีเกียทด1:5 28-36Volt ถูกมาก
1,000 บาท
-20%
ขายถูก มอเตอร์ 350w มีเกียทด1:5 28-36Volt ถูกมาก
1,000 บาท
-20% โมดูล relay5v 2ช่องเลือกลอจิกได้ มีopto ไม่ต้องกลัวว่า MCU จะพัง
120 บาท
โมดูล relay5v 2ช่องเลือกลอจิกได้ มีopto ไม่ต้องกลัวว่า MCU จะพัง
120 บาท
 ชุดขับ motor dc6v-24v 3APWM DC สวิทช์ควบคุมความเร็วมอเตอร์ความเร็ว 6V12V24V28V 3A
170 บาท
ชุดขับ motor dc6v-24v 3APWM DC สวิทช์ควบคุมความเร็วมอเตอร์ความเร็ว 6V12V24V28V 3A
170 บาท
 นาฬิกากันน้ำ สำหรับติดมอไซด์ เขียว
250 บาท
นาฬิกากันน้ำ สำหรับติดมอไซด์ เขียว
250 บาท
 วัด volt วัด temp แสดงเวลาในตัวเดียวกัน ไว้ติดรถมอเตอร์ไซด์ มีสามสีให้เลือก
250 บาท
วัด volt วัด temp แสดงเวลาในตัวเดียวกัน ไว้ติดรถมอเตอร์ไซด์ มีสามสีให้เลือก
250 บาท
 sensor วัดน้ำหนัก 10kg/20kg รุ่นถูกราคาเดียวกัน
450 บาท
sensor วัดน้ำหนัก 10kg/20kg รุ่นถูกราคาเดียวกัน
450 บาท
แยกตัวลูก4ตัวรีโมท2อัน") ชุด relay 12vไร้สายวิทยุ 500-3000m (คุมไฟฟ้า5-220v 30A)แยกตัวลูก4ตัวรีโมท2อัน
2,000 บาท
ชุด relay 12vไร้สายวิทยุ 500-3000m (คุมไฟฟ้า5-220v 30A)แยกตัวลูก4ตัวรีโมท2อัน
2,000 บาท
 แผ่นปริ๊นอเนกประสงค์ถูกมาก 18cm*30cm
150 บาท
แผ่นปริ๊นอเนกประสงค์ถูกมาก 18cm*30cm
150 บาท
แยกตัวลูก2ตัวรีโมทส่ง 2ตัว") ชุด relay 12vไร้สาย 30-100m (5-220v 10A)แยกตัวลูก2ตัวรีโมทส่ง 2ตัว
1,100 บาท
ชุด relay 12vไร้สาย 30-100m (5-220v 10A)แยกตัวลูก2ตัวรีโมทส่ง 2ตัว
1,100 บาท
 โมดูลตรวจจับเสียง มีภาคตรวจจับเสียง output เป็นลอจิก0
120
60 บาท
โมดูลตรวจจับเสียง มีภาคตรวจจับเสียง output เป็นลอจิก0
120
60 บาท
แยกตัวลูก4ตัว") ชุด relay 220vไร้สายผ่านคลื่นวิทยุ 2000-3000m (คุมไฟฟ้า5-220v 30A)แยกตัวลูก4ตัว
2,000
2,000 บาท
ชุด relay 220vไร้สายผ่านคลื่นวิทยุ 2000-3000m (คุมไฟฟ้า5-220v 30A)แยกตัวลูก4ตัว
2,000
2,000 บาท
 เครื่องโปรแกรมชิพ ทุกชนิด และ eeprom โปรแกรมได้แยอะมาก pic/51/avr/93/24 ได้หมด
2,400 บาท
เครื่องโปรแกรมชิพ ทุกชนิด และ eeprom โปรแกรมได้แยอะมาก pic/51/avr/93/24 ได้หมด
2,400 บาท
แยกตัวลูก2ตัว") ชุด relay 12vไร้สายคลื่นวิทยุ 30-100m (คุมไฟฟ้า5-220v 10A)แยกตัวลูก2ตัว
880 บาท
ชุด relay 12vไร้สายคลื่นวิทยุ 30-100m (คุมไฟฟ้า5-220v 10A)แยกตัวลูก2ตัว
880 บาท
 กลอนไฟฟ้า12Vแบบดูด 60KG สำหรับ ทำประตูไฟฟ้า
800
450 บาท
-40%
กลอนไฟฟ้า12Vแบบดูด 60KG สำหรับ ทำประตูไฟฟ้า
800
450 บาท
-40% Bluetooth V2.0 slave mode ใช้ไฟตั้งแต่ 3.3v-5v ได้ทุกตระกูล
350 บาท
Bluetooth V2.0 slave mode ใช้ไฟตั้งแต่ 3.3v-5v ได้ทุกตระกูล
350 บาท
 วัด v วัดtemp2ตัว แสดงเวลาได้แสงสีน้ำเงิน ติดมอไซด์ได้ นิวปาเจโรติดสวยมาก
530
340 บาท
-5%
วัด v วัดtemp2ตัว แสดงเวลาได้แสงสีน้ำเงิน ติดมอไซด์ได้ นิวปาเจโรติดสวยมาก
530
340 บาท
-5% โมดูลแปลงไฟ volt สูงให้เป็นไฟvoltต่ำกว่า ออก3A
120 บาท
โมดูลแปลงไฟ volt สูงให้เป็นไฟvoltต่ำกว่า ออก3A
120 บาท
 relay 220v คุมไฟ220v10A ไร้สายผ่านคลื่นวิทยุ 1000-3000m แยกตัวลูก6ตัว
3,300 บาท
relay 220v คุมไฟ220v10A ไร้สายผ่านคลื่นวิทยุ 1000-3000m แยกตัวลูก6ตัว
3,300 บาท
 ตัวแสดงผลน้ำหนัก 0.04kg-500kg มีoutput on/off relayได้ USB โปรแกรมบนคอมด้วย
8,000
2,500 บาท
-60%
ตัวแสดงผลน้ำหนัก 0.04kg-500kg มีoutput on/off relayได้ USB โปรแกรมบนคอมด้วย
8,000
2,500 บาท
-60% ชิพ 16F877A 40 ขา
150 บาท
ชิพ 16F877A 40 ขา
150 บาท
 ชุดขับ60A PWM DCmotor10-60vแบบกลับทางหมุนได้
1,500 บาท
ชุดขับ60A PWM DCmotor10-60vแบบกลับทางหมุนได้
1,500 บาท
 วัดแบตตะกั่วกรด24v มีระดับขีด/บอกแบตเหลือเท่าไหร่ รถตู้/รถบัส/รถบรรทุก
150 บาท
วัดแบตตะกั่วกรด24v มีระดับขีด/บอกแบตเหลือเท่าไหร่ รถตู้/รถบัส/รถบรรทุก
150 บาท
 โมดูลแปลงไฟ volt ต่ำให้เป็นไฟvoltสูง2A
100 บาท
โมดูลแปลงไฟ volt ต่ำให้เป็นไฟvoltสูง2A
100 บาท
 วัดแบตแห้ง24v มีระดับขีดบอกแบตเหลือเท่าไหร่ รถตู้ รถบัส รถบรรทุก
150 บาท
วัดแบตแห้ง24v มีระดับขีดบอกแบตเหลือเท่าไหร่ รถตู้ รถบัส รถบรรทุก
150 บาท
 JACK BANANA แจ๊คกล้วยตัวผู้ สำหรับต่อมิเตอร์ สีดำ แดงราคาต่อตัว
10 บาท
JACK BANANA แจ๊คกล้วยตัวผู้ สำหรับต่อมิเตอร์ สีดำ แดงราคาต่อตัว
10 บาท
 มือเบรคป้องกันการลื่นไถล มี 2 ข้าง
250 บาท
มือเบรคป้องกันการลื่นไถล มี 2 ข้าง
250 บาท
 ตัวอัดเสียง30เสียงหรือได้หลายไฟล์เสียง เสียงออกลำโพงใหญ่ได้
2,500 บาท
ตัวอัดเสียง30เสียงหรือได้หลายไฟล์เสียง เสียงออกลำโพงใหญ่ได้
2,500 บาท
 กรอบเปล่าๆ สำหรับใส่มิเตอร์ ชนิดต่างๆ
40 บาท
กรอบเปล่าๆ สำหรับใส่มิเตอร์ ชนิดต่างๆ
40 บาท
 ชุดขับ motor PWM DC ควบคุมความเร็วมอเตอร์ 3V 5V 1.8V 6V 12V 2A
150 บาท
ชุดขับ motor PWM DC ควบคุมความเร็วมอเตอร์ 3V 5V 1.8V 6V 12V 2A
150 บาท
 กลอนไฟฟ้า12v สำหรับประตูอลูมิเนียม หอพัก
1,200
550 บาท
-50%
กลอนไฟฟ้า12v สำหรับประตูอลูมิเนียม หอพัก
1,200
550 บาท
-50% โปรแกรมชิพ ทุกชนิด และ eeprom โปรแกรมได้แยอะมากพร้อม socketครบถ้วน
2,700 บาท
โปรแกรมชิพ ทุกชนิด และ eeprom โปรแกรมได้แยอะมากพร้อม socketครบถ้วน
2,700 บาท
 โมดูลบันทึกเสียง 18 วิ ISD1820 ใช้งานง่าย พร้อมลำโพง
110 บาท
โมดูลบันทึกเสียง 18 วิ ISD1820 ใช้งานง่าย พร้อมลำโพง
110 บาท
 sensor loadcell วัดน้ำหนัก 100kg แบบประหยัด
100 บาท
sensor loadcell วัดน้ำหนัก 100kg แบบประหยัด
100 บาท
 เครื่องมือซ่อมแซมซ่อมยางรถจักรยานไฟฟ้า
300
100 บาท
-70%
เครื่องมือซ่อมแซมซ่อมยางรถจักรยานไฟฟ้า
300
100 บาท
-70% BANANA20A แจ๊คกล้วยตัวเมียสีพิเศษ สำหรับมิเตอร์ สีเขียว/เหลือง/น้ำเงิน 4มม
30 บาท
BANANA20A แจ๊คกล้วยตัวเมียสีพิเศษ สำหรับมิเตอร์ สีเขียว/เหลือง/น้ำเงิน 4มม
30 บาท
 - Taobao.png "หัวหนีบปากคีบจระเข้เอาไว้หนีบวงจร ขนาดหัวถึงท้าย6cm") หัวหนีบปากคีบจระเข้เอาไว้หนีบวงจร ขนาดหัวถึงท้าย6cm
5 บาท
หัวหนีบปากคีบจระเข้เอาไว้หนีบวงจร ขนาดหัวถึงท้าย6cm
5 บาท
.jpg "วัด temp มีเวลาวันที่วัดvoltได้15vไว้ติดรถใช้แทนนาฬิกา0.56นิ้ว") วัด temp มีเวลาวันที่วัดvoltได้15vไว้ติดรถใช้แทนนาฬิกา0.56นิ้ว
250 บาท
วัด temp มีเวลาวันที่วัดvoltได้15vไว้ติดรถใช้แทนนาฬิกา0.56นิ้ว
250 บาท
 มิเตอร์24v สีแดง คุมอุณหภูมิหม้อน้ำรถมีrelayหน้าปัดสวยๆ สำหรับรถตู้ สิบล้อ รถบัส
800
550 บาท
-20%
มิเตอร์24v สีแดง คุมอุณหภูมิหม้อน้ำรถมีrelayหน้าปัดสวยๆ สำหรับรถตู้ สิบล้อ รถบัส
800
550 บาท
-20% 36V 350W ตัวควบคุม DC motor ชนิดมีแปรงถ่าน
950
480 บาท
36V 350W ตัวควบคุม DC motor ชนิดมีแปรงถ่าน
950
480 บาท
 heater 900w 220v
500 บาท
heater 900w 220v
500 บาท
|
| รับข่าวสารทางอีเมล |
|---|
| แท็ก |
|---|
| ดู VDO การทำโครงงานทั้งหมดของ อ.ประเสริฐ ตรวจสอบสถานะไปรษณีย์ |
|
ชื่อสินค้า : โมดูล ultrasonic วัดระยะ 2cm - 4เมตร ตัวเล็กมากราคา:99บาท
|
|---|
|
ลากเม้าเพื่อ ดูรายละเอียดเพิ่มเติม คลิ๊กดูรูปอื่นได้ จะสั่งซื้อกดที่รถเข็นด้านขวานี้ --)

ลากเม้าเพื่อ ดูรายละเอียดเพิ่มเติม คลิ๊กดูรูปอื่นได้ จะสั่งซื้อกดที่รถเข็นด้านขวานี้ --)

ลากเม้าเพื่อ ดูรายละเอียดเพิ่มเติม คลิ๊กดูรูปอื่นได้ จะสั่งซื้อกดที่รถเข็นด้านขวานี้ --)

|
| รายละเอียดสินค้า รหัสสินค้า 005004 |
|---|
|
เข้าชม : 16453 | สั่งซื้อไปแล้ว : มากกว่า5 | Wishlist Rate : 6
จำนวนในstock : 27
เพิ่มลง Wishlist
ผมเทสทีเดียว 500 ตัว ทุกตัวใช้ได้แน่นอน ก็คือได้ตั้งแต่ 5 cm ถึง 400 cm ครับ ตัวนี้ต้องมี MCUเช่น 51/pic/arduino เขียนโปรแกรมให้มัน ถ้าจะต่อเข้าคอม หรือจะแสดงผล ใช้ทำ sensor parking วัดระดับความสูง ก็ได้ วัดระยะทางก็ได้ ดูการเทส การใช้งานultra ตัวนี้ ได้ที่นี่ง่ายมากครับ คลิ๊กครับ หากไม่เห็นภาพในการใช้งาน ให้ดู vdo ทีี่ผมใช้ตัวนี้ทำโครงงานนะครับ ดู vdo โครงงานที่ผมใช้ตัวนี้ทำโปรเจคได้ครับ ตรง บทความ การตรวจจับต่างๆ ด้านบนเมนู หรือ คลิ๊กตรงนี้ได้เลยครับ บทความเกี่ยวกับระบบจอดรถ parking sensor คลิ๊กเลย  แผ่นยึด sensor ultrasonic รุ่น HC-sr04 และรุ่นใกล้เคียง แผ่นยึด sensor ultrasonic รุ่น HC-sr04 และรุ่นใกล้เคียง รหัสสินค้า 000002500001 โมดูล ultrasonic วัดระยะ 2-4เมตร ตัวเล็กมาก มี 4 ขา 1. vcc 5V 2. gnd 3. trig -> ส่งสัญญาณให้ส่ง คลื่นออกไป 4. echo -> ขารับสัญญาณหากได้รับ คลื่นที่เราออกไป จากสูตร v = s/t เมื่อความเร็วเสียง = 431m/sec s คือระยะที่เราจะวัด t เราใช้ MCU จับเวลา ก็เอามาเข้าสูตร ก็จะได้เวลาแล้ว ไม่ต้องกลัวว่าจะใช้ไม่เป็นครับ ผมมี library สำหรับ MCU51,pic,avr,arduino ให้ฟรีครับ เขียนเอง ไม่ได้ coppy จากใครมา ไม่ต้อง link ไปยัง web ต่างประเทศให้มาแปลภาษาให้เมื่อย http://www.micropik.com/PDF/HCSR04.pdf ขอเพียงซื้อสินค้าตัวนี้ ของ อ ประเสริฐ เดี๊ยวส่ง link ไปให้ จัดเต็ม!!! เทสก่อน ถึงมือลูกค้า ทุกตัว ถ้าอยากได้แบบกันน้ำใช้กลางแจ้งได้เลือกตัวนี้ครับ  โมดูล ultrasonic แบบกันน้ำวัดได้ไกล 5เมตร โมดูล ultrasonic แบบกันน้ำวัดได้ไกล 5เมตร รหัสสินค้า 005083 source code 16f84 ใช้ mikro c void main () { int width; int range; TRISA=0x08; TRISB=0x00; Loop: PORTB=0x00; width=0; range=0; PORTA=0x04; //send pulse with a 20us width delay_us(20); PORTA=0x00; while (PORTA.F3==0) //wait until an echo is received { } while (PORTA.F3==1) //calculate the width of the echo received { delay_us(10); width++; } range=(width*10)/58; //calculate range if (range<100) //if range less than 100m turn on LED { PORTB=0x10; delay_ms(500); } PORTB=0x00; delay_ms(100); goto Loop; } 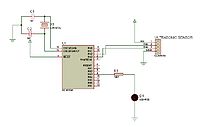 สินค้าตัวเอาไว้ทำพวกนี้ก็ได้ครับ เอาไว้ทำตัววัดระยะทาง เอาไว้ทำ ไม้เท้าสำหรับคนตาบอด source code ARDUINO http://www.instructables.com/id/Easy-ultrasonic-4-pin-sensor-monitoring-hc-sr04/ The new code(4pin): void setup() { pinMode (2,OUTPUT);//attach pin 2 to vcc pinMode (5,OUTPUT);//attach pin 5 to GND // initialize serial communication: Serial.begin(9600); } void loop() { digitalWrite(2, HIGH); // establish variables for duration of the ping, // and the distance result in inches and centimeters: long duration, inches, cm; // The PING))) is triggered by a HIGH pulse of 2 or more microseconds. // Give a short LOW pulse beforehand to ensure a clean HIGH pulse: pinMode(3, OUTPUT);// attach pin 3 to Trig digitalWrite(3, LOW); delayMicroseconds(2); digitalWrite(3, HIGH); delayMicroseconds(5); digitalWrite(3, LOW); // The same pin is used to read the signal from the PING))): a HIGH // pulse whose duration is the time (in microseconds) from the sending // of the ping to the reception of its echo off of an object. pinMode (4, INPUT);//attach pin 4 to Echo duration = pulseIn(4, HIGH); // convert the time into a distance inches = microsecondsToInches(duration); cm = microsecondsToCentimeters(duration); Serial.print(inches); Serial.print("in, "); Serial.print(cm); Serial.print("cm"); Serial.println(); delay(100); } long microsecondsToInches(long microseconds) { // According to Parallax's datasheet for the PING))), there are // 73.746 microseconds per inch (i.e. sound travels at 1130 feet per // second). This gives the distance travelled by the ping, outbound // and return, so we divide by 2 to get the distance of the obstacle. // See: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf return microseconds / 74 / 2; } long microsecondsToCentimeters(long microseconds) { // The speed of sound is 340 m/s or 29 microseconds per centimeter. // The ping travels out and back, so to find the distance of the // object we take half of the distance travelled. return microseconds / 29 / 2; } |
| ภาพสินค้าอื่นๆ คลิ๊กที่รูป หากต้องการ Zoom กดแว่นขยาย ลาก mouse ที่ภาพเลื่อนซ้ายขวาได้ |
|---|
|
1,500
ราคาสั่งจากหน้า web 99 บาท ราคาซื้อเองที่สาขา 109 บาท  -99% -99% |
| สินค้าที่เกี่ยวข้อง |
|---|
|
electhailand@gmail.com เมล์นี้ใช้ติดตามสินค้า สั่งสินค้า และสอบถามครับ





 - Taobao.png "MMA7361 โมดูลเซ็นเซอร์ accelerometer")



